Présentation
"J'ai toujours été fasciné par le rôle qu'ont les ingénieurs de transformer les idées résidant uniquement dans les pensées en systèmes réels.
On peut ainsi dire qu'ils font de nos rêves la réalité."
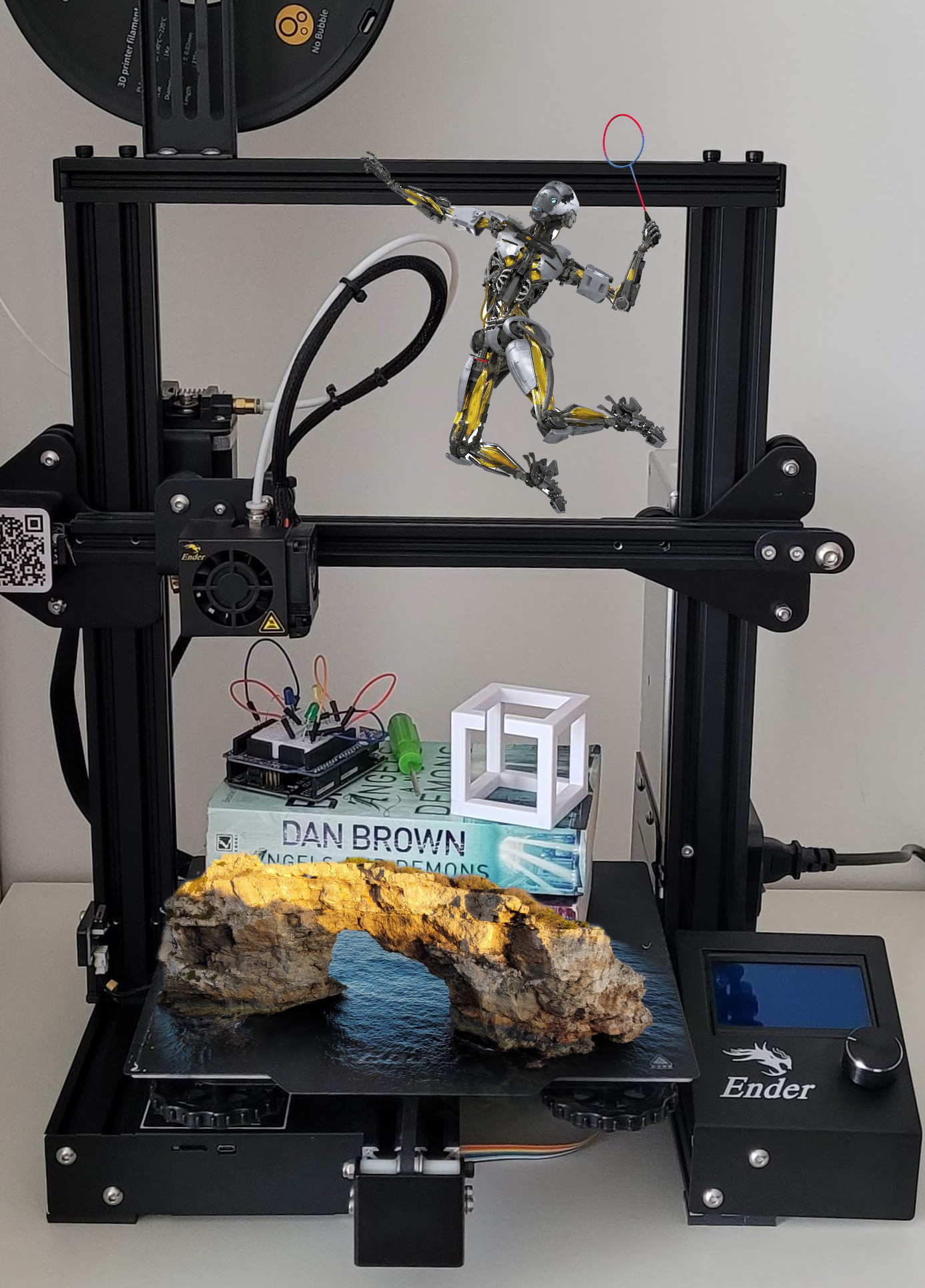
L'image à gauche est mon autoportrait sans portrait. Toutes mes passions y sont représentées : la mécatronique, la robotique, la lecture, le voyage et le badminton. Il manque plus que la guitare et la programmation.

Pong Arduino (8 ans)
Mon tout premier montage effectué avec Arduino et Scratch. Il s'agit d'une manette à deux boutons controlant un jeu de pong.
Mes premiers jeux vidéos - Le jeu du skieur
Codé en CM2 en javascript, html, et css, il s'agit d'un simple jeu dans lequel le skieur doit passer entre les bonnes portes pour gagner des points. Je peux affirmer que c'est mon premier jeu vidéo.
Mes premiers jeux vidéos - Minesweeper
Codé en 6eme dans le meme language, il s'agit d'un projet plus complexe car il demande plus de logique pour faire le compte des bombes et l'algorithme de revelation des cases.
Mes premiers jeux vidéos - Jeu de tir sur une cible (6eme - 5eme)
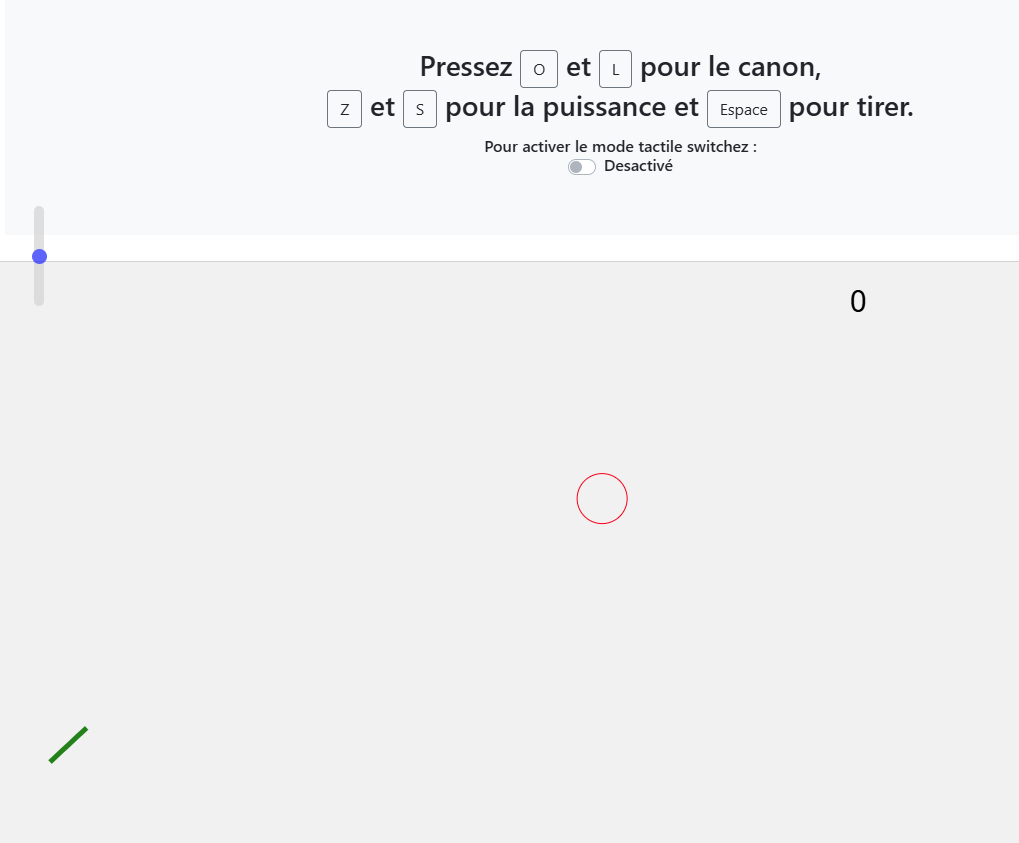
Ce projet m'a permis de m'initier à des concepts de physique tels que le calcul de l'acceleration, de la vitesse et donc des coordonnées du projectile en fonction de l'attraction gravitationelle et des conditions initiales. J'ai pu ainsi decouvrir les bases de la trigonometrie afin de mettre en relation l'angle de tir et les coordonnées x et y. Testez le ici

Mes premiers jeux vidéos - Création d'un jeu de tir multijoueur en ligne (5eme)
Afin de découvrir le développement côté serveur avec PHP, j'ai pu coder ce jeu dans lequel deux utilisateurs sur des ordinateurs différents peuvent se tirer dessus avec des chars. Les chars et les tirs se synchronisaient bien.
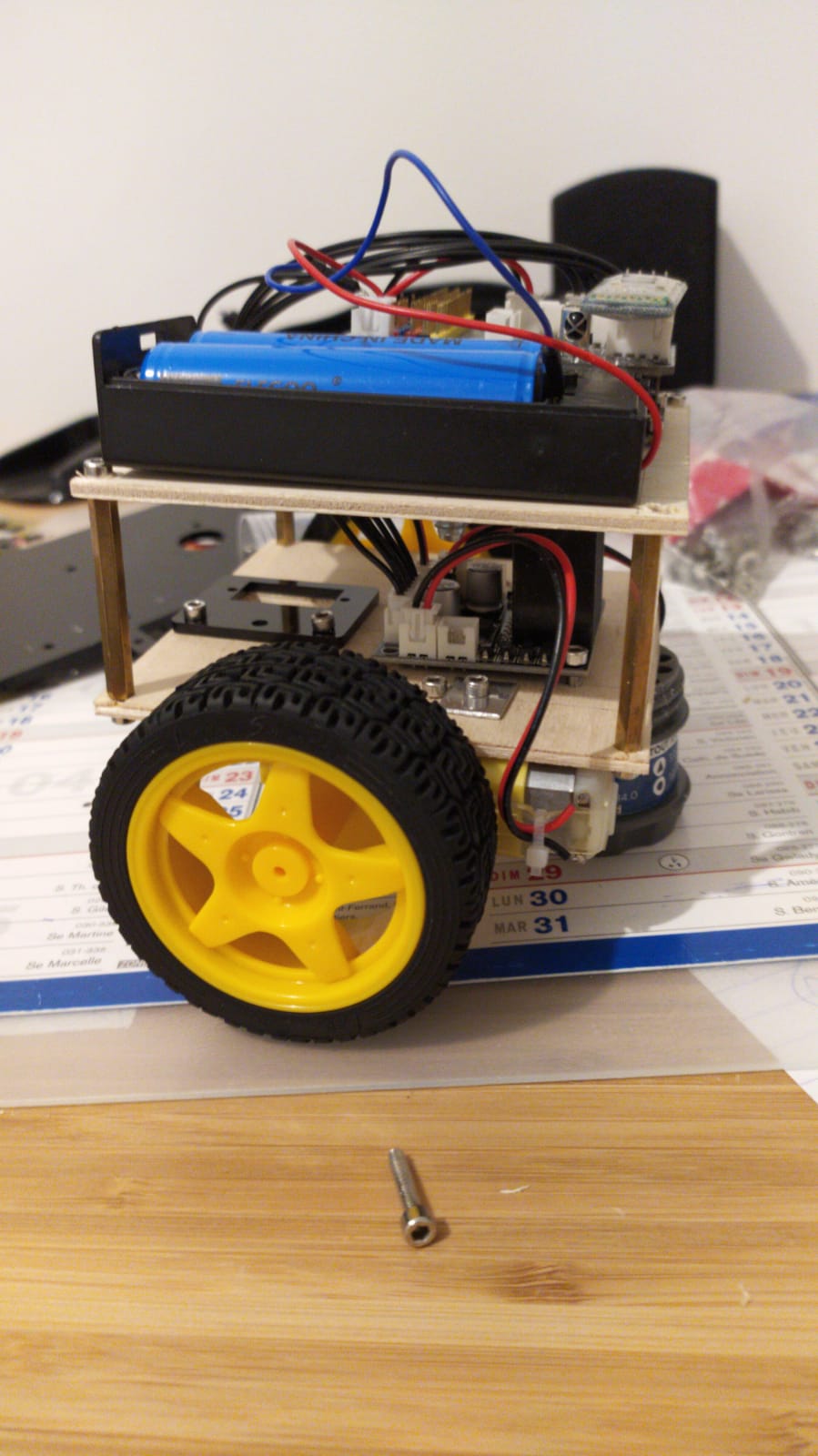
5eme - Robot gyropode
Intéressé par le fonctionnement des véhicules gyropodes, véhicules stabilisés par un gyroscope, j'ai décidé de construire ce robot se balançant avec ses deux roues motorisées, de façon à se tenir debout. Le composant le plus important est ici le capteur gyroscope informant le robot de son inclinaison. Le châssis est fait à partir de planche de bois, n'ayant pas encore accès aux imprimantes 3D.
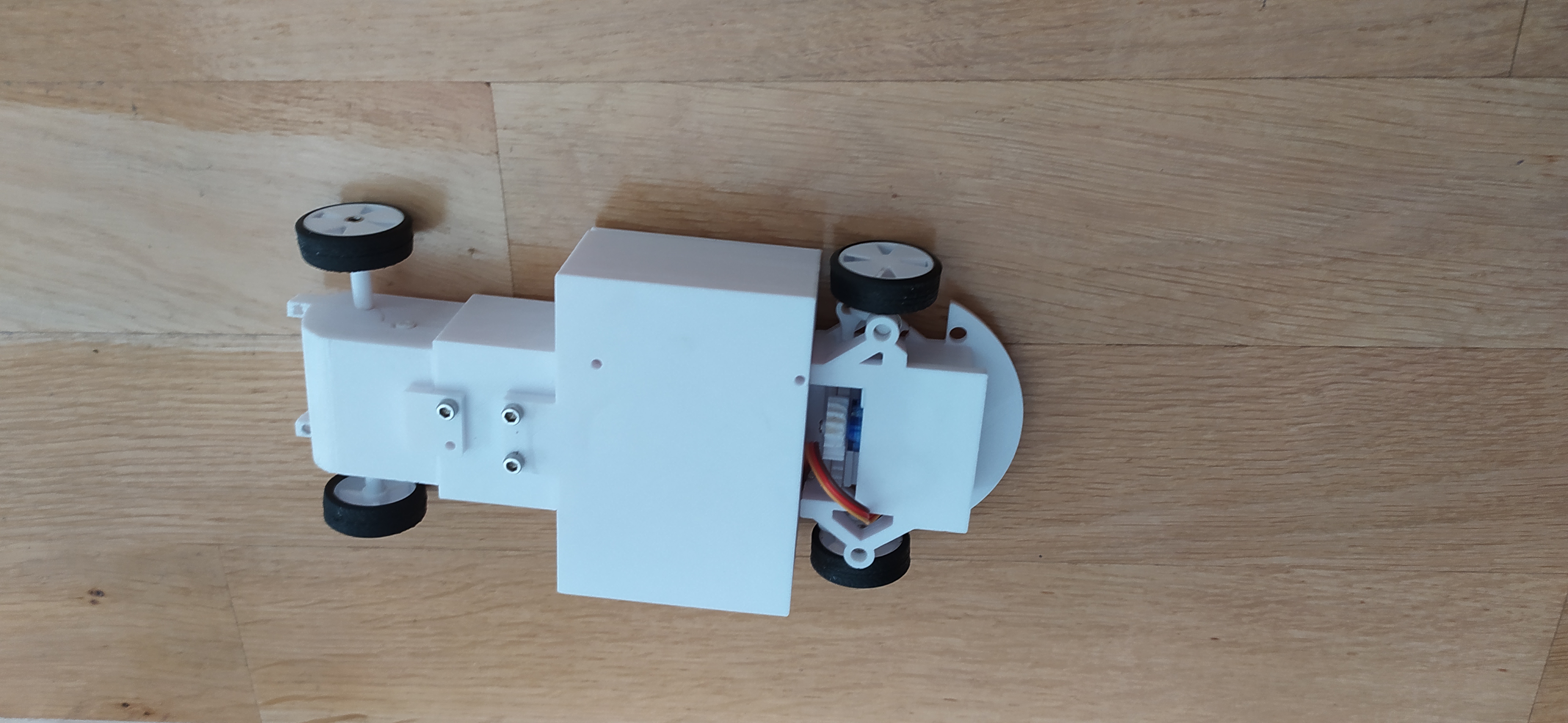
Voiture télécommandée
EN 4eme, après avoir decouvert l'impression 3D, j'ai eu l'ambition de concevoir, modeliser et imprimer en 3d une voiture télécommandée. J'ai voulu en faire une unique avec des pieces interessantes telles qu'un differentiel.
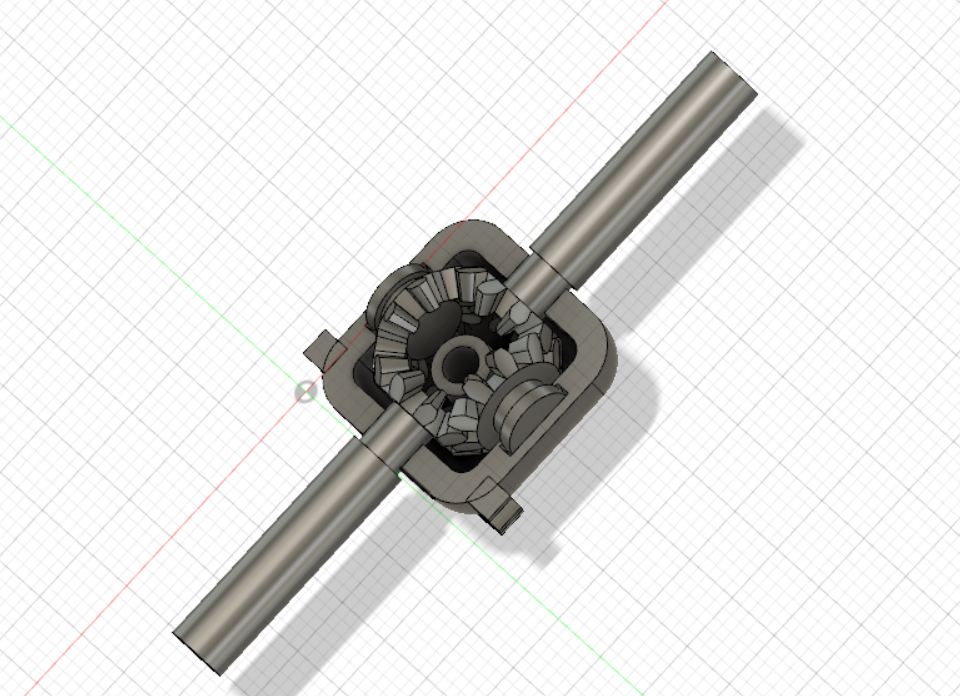
Voiture télécommandée - Différentiel
Une de mes pièces préférées. On retrouve le differentiel dans toutes les voitures pour lequels les roues arrières sont motrices. Il permet de d'augmenter la vitesse de la roue à l'exterieur du virage, donc qui parcourt plus de distance, ce qui ameliore la tenue de route du vehicule.
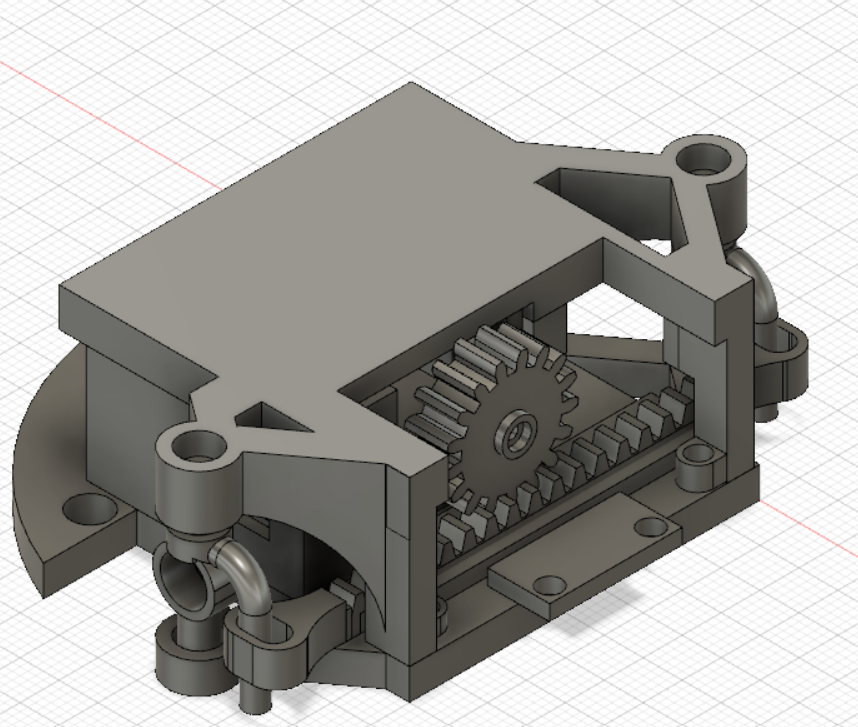
Voiture télécommandée - Organe de direction
Avec un système de crémaillère mené par un servomoteur.
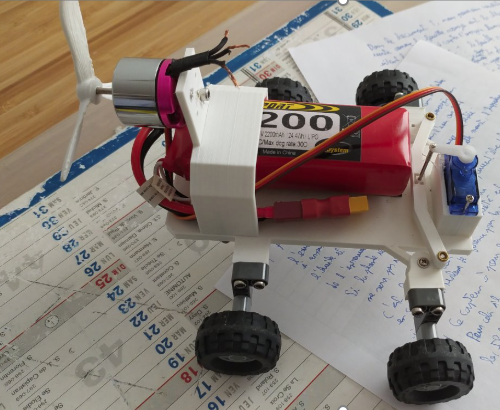
Voiture à hélice télécommandée
En 3ème, à l'aide de mes connaissances du BIA, j'ai conçu et imprimé une voiture à helice telecommandée afin de tester les performance de l'helice que j'ai mis au point.

Voiture télécommandée - V.0.1
Mais avant d'arriver à cette version radiocommandée et plus performante, j'ai testé mes premières helice à l'aide de ce petit prototype en lego.
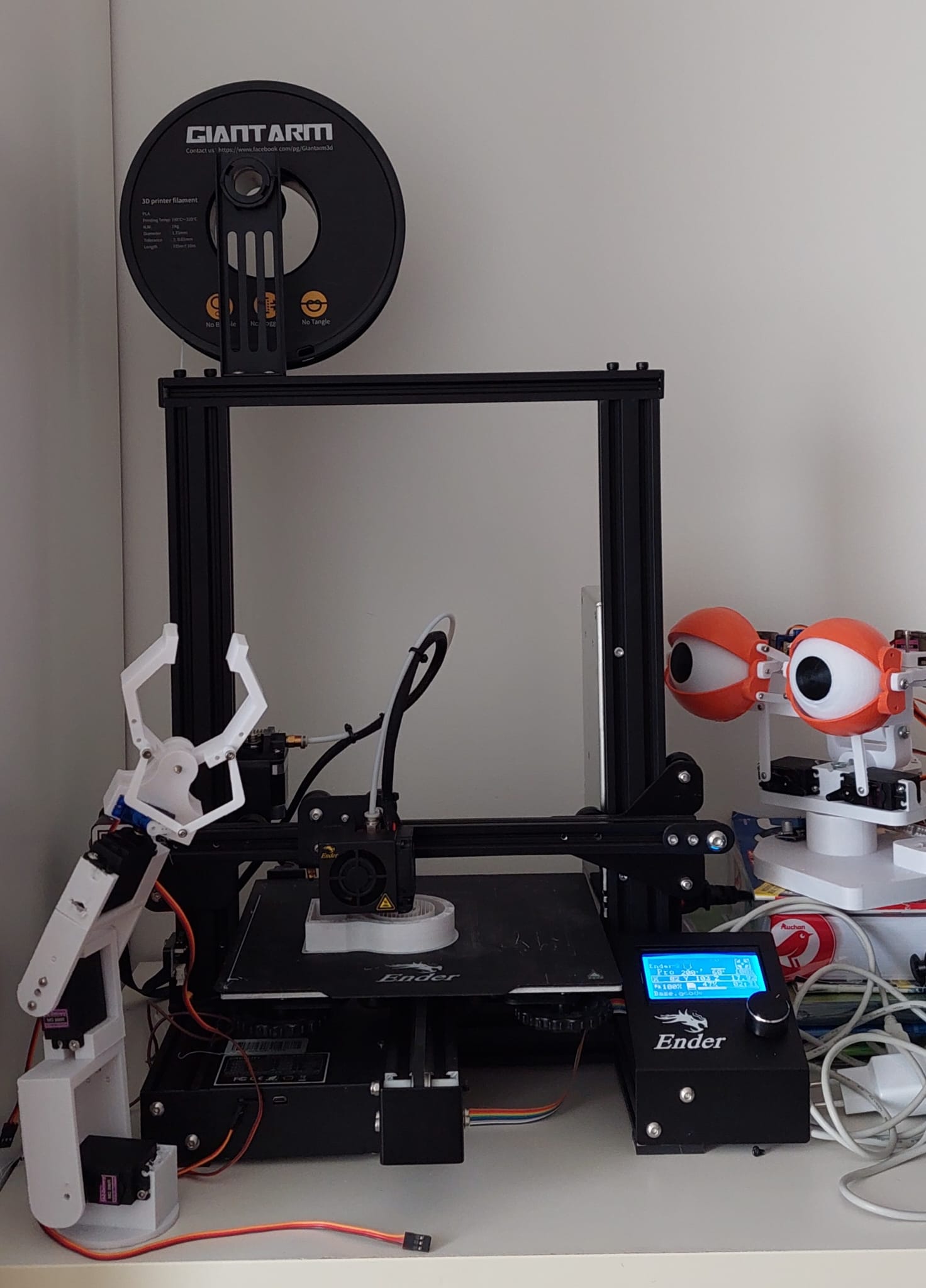
Robotique - Robot expressif
Passionné de robotique et cherchant un compagnon pour certaines de mes presntations au collège, j'ai decidé de construire et ameliorer ce robot du youtubeur britannique James Bruton. Je l'ai rendu par la suite transportable et j'ai decidé de lui construire un bras.

Robotique - Mini robot aspirateur (Fail)
Afin d'innover, j'ai tenté de mettre au point un mini robot aspirateur qui tiendrait sur une table et qui pourrait l'aspirer. Mais le projet était trop ambitieux et a été un echec en raison du manque de puissance de l'aspirateur (il aspirait un peu mais pas assez).
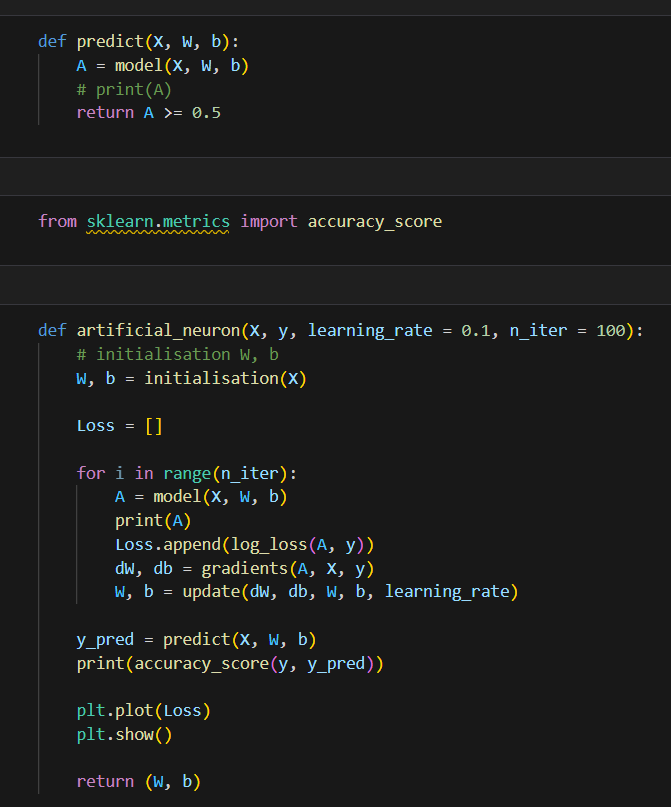
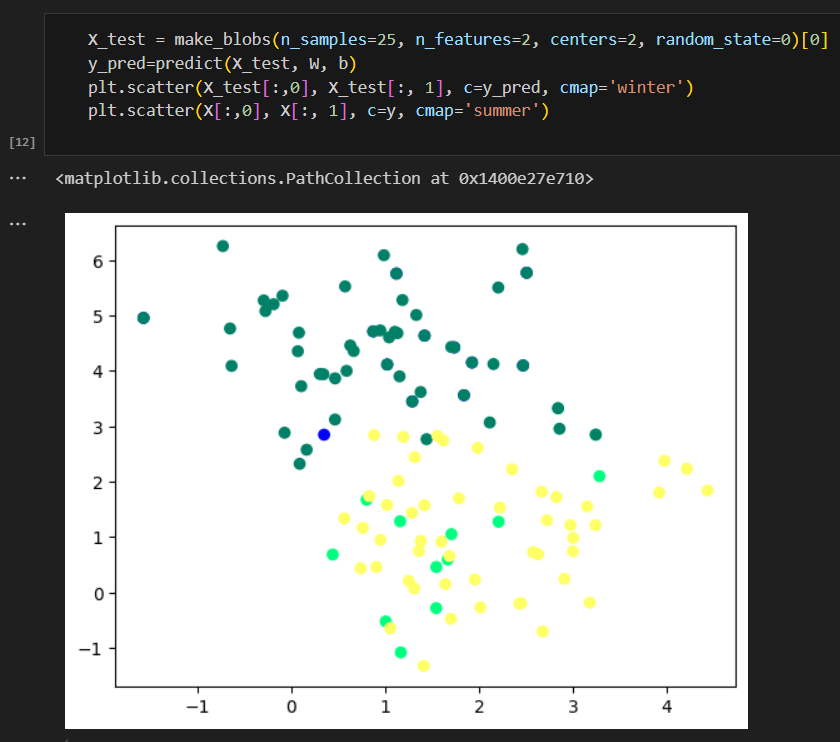
Seconde - Découverte du Machine Learning
Alors que l'IA entrait dans une nouvelle ère (ChatGPT a été rendu publique à ce moment), j'ai decidé des decouvrir les secrets de ces IA. Je me suis initié pour cela au Machine learning et au Deep Learning, qui sont au coeur des IA. Pour cela j'ai emprunté à la bibliothèque des livres à ce suje et j'ai regardé de nomberuses vidéos dont celle de Machine Learnia et les cours filmés de Stanford. Je souhaitais comprendre les explications mathematiques des modeles de machine learning (par exemple les perceptron simple et les reseaux de neurones). Par la suite j'ai pu effectuer mes premieres regressions lineaires.
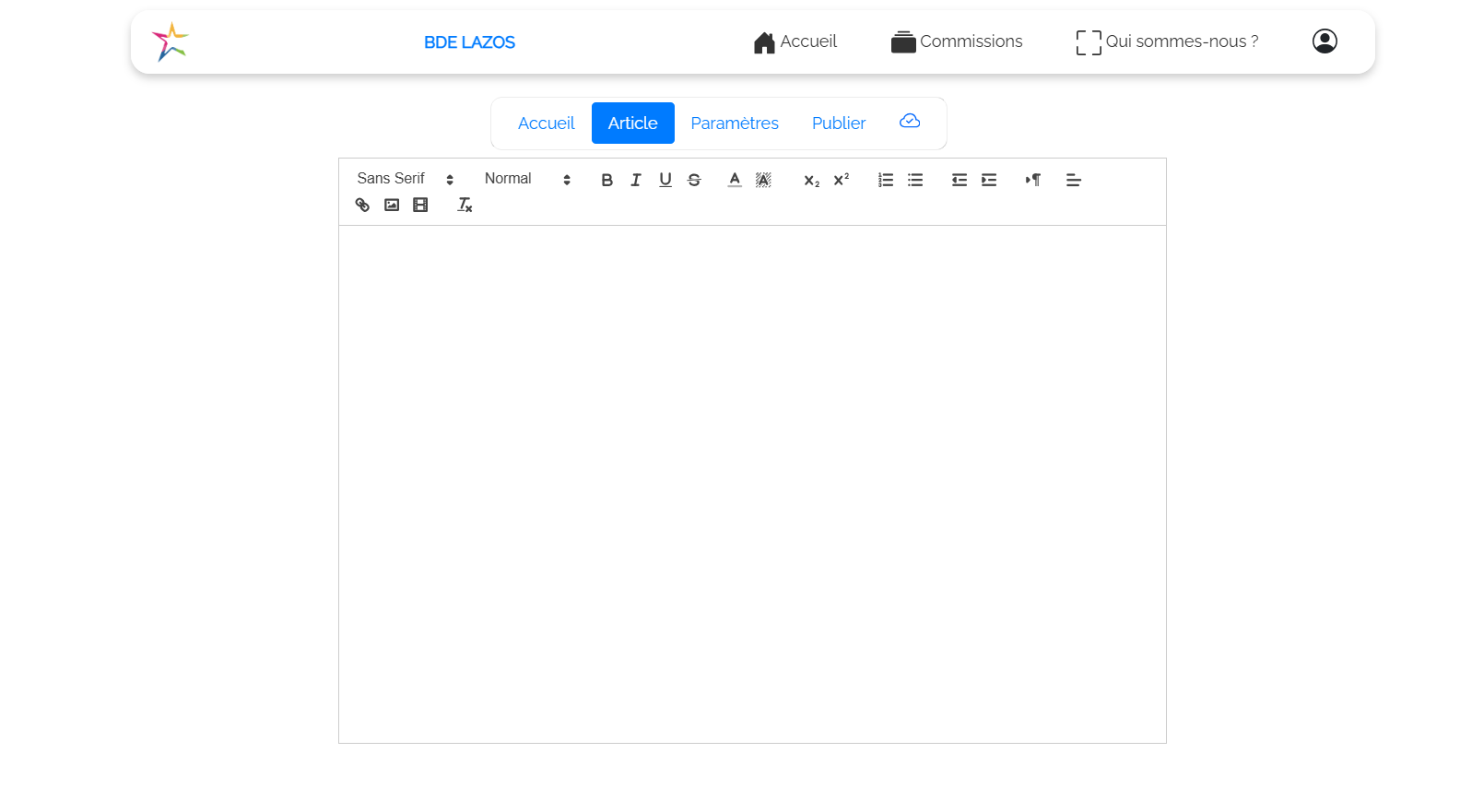
Première - Participation à la commission scientifique du BDE
J’ai mis mes passions (la mécatronique et la programmation) à disposition de mon lycée, les Lazaristes en faisant partie de la nouvelle commission scientifique en première du BDE. J’ai participé à la programmation d’un nouveau site pour le BDE, et mis en place le serveur de développement. Sur la capture d'écran on peut voir l'éditeur d'article pour le site du BDE que notre équipe a développé.
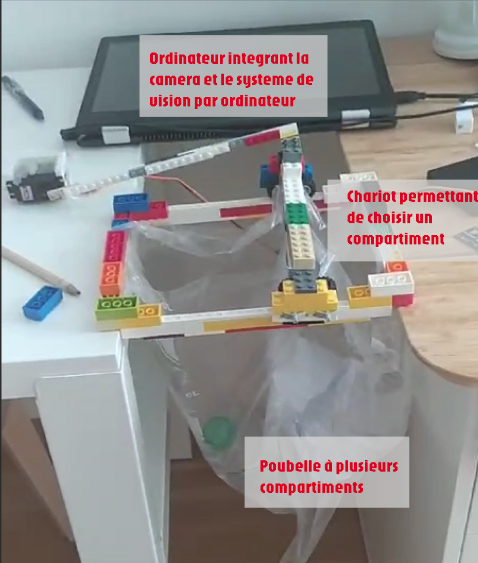
Été 2024 - Création d'une poubelle triant les déchets grâce au Deep Learning
Ce projet a pour vocation d'etre écologique. Il en est qu'à l'etat de prototype lego. Cette poubelle pourrait etre deployée dans les espaces publics où les gens n'y peuvent pas forcement faire efficacement le tri. Pour la realiser j'ai decidé de faire appel à mes connaissances de SI pour concevoir le système de compartiment et en Deep learning (utilisation de reseaux de neurones convolutifs pour reconnaitres la categories des objets). Dans cette video, à titre de demonstration, la poubelle differencie la plastique du papier.
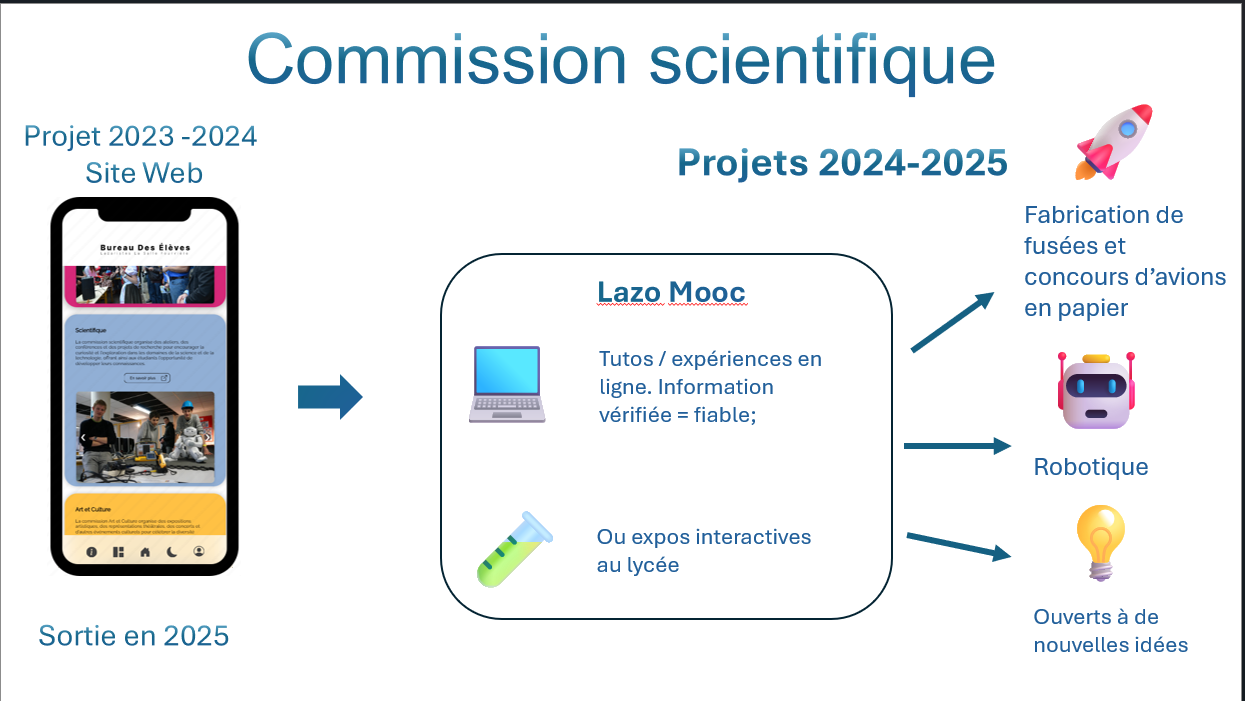
Terminale - Prise de la direction de la commission scientifique
Parmi nos projets phares, nous lançons un concours d’avions en papier pour présenter des concepts d’aéronautique de manière ludique. Nous organisons aussi la finalisation du site du BDE sur lequel nous souhaiterions aussi introduire un système de partage de fiche de révisions et publier des articles de vulgarisation scientifique. Pour finir, nous sommes en train d’élaborer la création d’un atelier de programmation ou de robotique au lycée.